 شرکت میلتا Mielta Technologies
شرکت میلتا Mielta Technologies شرکت روسما Rossma
شرکت روسما Rossma شرکت کیوریتور Qrator
شرکت کیوریتور Qrator گواهینامه پایداری سیستم B Corp
گواهینامه پایداری سیستم B Corp
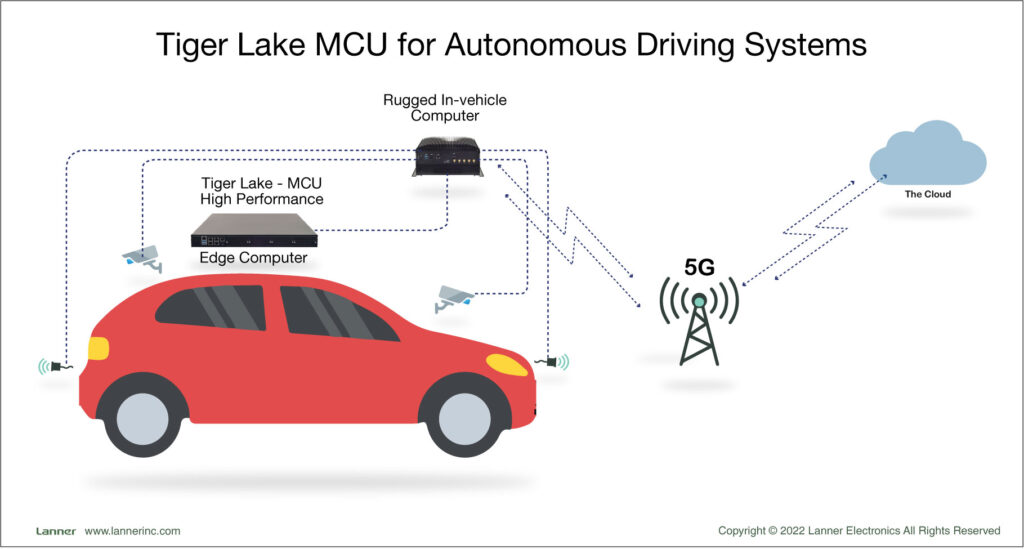
چالش تأخیر در سیستمهای رانندگی خودکار
انتظار برای دریافت پاسخ از یک سیستم ابری در فرآیندهای حساس و زمانواقعی مانند رانندگی خودکار، عملاً غیرممکن است. تأخیر شبکه، حجم بالای دادهها و نگرانیهای امنیتی، استفاده از معماری سنتی ابری را برای خودروهای خودران ناکارآمد میکند.
زمینه
تکنولوژی هوش مصنوعی (AI) و یادگیری ماشین (ML[1]) بدون شک بهترین مسیر برای سیستمهای رانندگی خودکار کارآمد و دقیق است، اما یکی از چالشهای بزرگ همین مسئله است. تکنولوژی سنتی درون خودرو توانایی مورد نیاز برای انجام بارهای پردازشی بالا، به ویژه تصمیمگیریهای AI و ML متمرکز درون خودرو را ندارد.
مهمترین مرکز هوش AI و ML در اکثر مواقع در مراکز داده دستکمی قدرتمند در ابر قرار دارد و نه در یک کامپیوتر درون خودرو. اگر یک خودروی خودرانکننده در حال حرکت میخواهد از AI و ML بهرهبرداری کند، نیاز به پهنای باند بسیار بالا و برد بیسیم بسیار سریع دارد. تکنولوژیهای معمولی ارتباطات گسترده مانند 3G و 4G نمیتوانند این نیازها را برآورده کنند.
خودروهای خودران باید دادههای خود را به ابر یا دیگر خودروهای نزدیک به صورت زمانواقعی ارتباط دهند. اگرچه 5G یکی از تکنولوژیهای اساسی برای سیستمهای رانندگی خودکار است، چرا که زمان پاسخ کاهش یافته، اما خودروها هنوز باید در تصمیمگیریهای هوش مصنوعی، به طور اصلی به صورت آفلاین، خودمختار باشند. خودروهای خودران بسیاری از ارتباطات با تاخیر بسیار پایین برای بهرهبرداری از محاسبات ابری برای اتخاذ تصمیمات سریع در جاده نیاز دارند.
[1] ML یا “یادگیری ماشینی” اختصار عبارت Machine Learning است و یک زیرشاخه از هوش مصنوعی (AI) میباشد. ML به کامپیوترها و سیستمهای مختلف امکان میدهد تا از دادههای ورودی یاد بگیرند و براساس این یادگیری تصمیمگیری کنند. به طور ساده، ML به کامپیوترها اجازه میدهد که بدون برنامهریزی صریح، از دادهها یاد بگیرند و الگوها و اطلاعات مفهومی را استخراج کنند.
نیازمندی ها
شرکت لنر در حال حضور در چندین پروژه سیستمهای رانندگی خودکار است. برای انطباق با نیازها و مقررات، لنر دارای گواهی ISO 26262 [1] است که تعهد به گسترش پلتفرمهای محاسباتی لبه به منظور رانندگی خودکار را تایید میکند. در حال حاضر (سال 2022)، لنر پلتفرمهای محاسباتی لبه توانمند شده توسط هوش مصنوعی ارائه میدهد تا رانندگی خودکار و هوش مصنوعی را فعال کند. بیشترین زمان، خودروهای رانندگی خودکار نیاز به دو سیستم محاسباتی درون خودرو دارند. یک کامپیوتر دادهها و تصاویر حجیمی که توسط دوربینها و حسگرها جمعآوری شدهاند را پردازش میکند. و یک کامپیوتر دوم برای تجزیه و تحلیل دادههای تصویر پردازش شده و اتخاذ تصمیمات هوشی و سریع برای خودرو انجام میدهد.
- پیشپردازش دادههای جمعآوری شده: خودروهای خودران دارای دوربینهای ویدئویی و انواع حسگرهایی مانند فوقالصوتی، LiDAR [2] و رادار برای شناخت محیط اطراف و اجزای داخلی خود هستند. این دادههای منشاء از منابع مختلف خودرو باید از طریق فرآیندهای تجمیع و فشردهسازی داده به سرعت پردازش شوند. یک کامپیوتر درون خودرو باید دارای چندین پورت ورودی/خروجی برای دریافت و ارسال دادهها باشد.
- اتصال امن به شبکه: راهحل محاسباتی درون خودرو باید به امان به اینترنت متصل بماند تا دادههای پیشپردازش شده را به ابر ارسال کند. در این مورد، داشتن اتصالات بیسیم چندگانه برای ایجاد اطمینان و افزایش سرعت بسیار حیاتی است. اتصال با سرعت بالا همچنین برای ارائه مداوم بهروزرسانیهای خودرو یا بهروزرسانیهای “فشاری” مانند مکان، شرایط جاده و تلمتیک خودرو ضروری است.
- محاسبات با عملکرد بالا: خودروهای خودران ممکن است در هر ثانیه تقریباً 1 گیگابایت داده تولید کنند. جمعآوری و ارسال یک قسمت کوچک از این داده (به عنوان مثال، 5 دقیقه داده) به یک سرور مبتنی بر ابر برای تجزیه و تحلیل عملی نیست و به دلیل پهنای باند و تاخیر محدود بسیار چالشبرانگیز است. سیستمهای رانندگی خودکار نباید همیشه برای پردازش دادههای خود به شبکه و خدمات ابری اعتماد کنند. خودروهای خودران نیاز به پردازش دادههای زمانواقعی دارند تا بتوانند بر اساس محیط اطراف خود تصمیمات مهم و سریعی بگیرند. محاسبات لبه درون خودرو برای کاهش نیاز به اتصال به شبکه (تصمیمگیری آفلاین) و افزایش دقت تصمیمگیری حیاتی است.
[1] استاندارد ISO 26262 یک استاندارد بینالمللی است که به تأسیس و تطبیق سیستمهای الکترونیکی در خودروها اختصاص دارد. این استاندارد به تأمین ایمنی و قابلیت اطمینان سیستمهای الکترونیکی در خودروها اهمیت میدهد و به منظور جلوگیری از خطاها و حوادث ناشی از آنها در خودروها بهکار میرود.
[2] LiDAR مخفف عبارت “Light Detection and Ranging” است و یک تکنولوژی اندازهگیری فاصله و تصویربرداری با استفاده از انتشار پرتوهای نوری است. این تکنولوژی برای ایجاد نقشههای سه بعدی از محیط، شناسایی اشیاء و اندازهگیری فواصل با دقت بالا استفاده میشود. LiDAR از یک لیزر نوری به عنوان منبع اصلی استفاده میکند که به شیها و سطوح مختلف ارسال میشود، و با اندازهگیری زمانی که لیزر برای برگشت به دستگاه LiDAR به آن نیز نیاز دارد، فواصل و موقعیت اشیاء را تعیین میکند.
راهحل جمعآوری داده و پردازش با عملکرد بالا درون خودرو
سری مقاوم درون خودروی لنر (مانند V6S) گزینههای عالی برای پردازش داده و اتصال به شبکه هستند. آنها پورتهای ورودی/خروجی با امکان PoE، پورتهای سریال COM، پورتهای خروجی ویدئو، GPS، USB و گسترش فضای ذخیرهسازی و تبدیل ویدئویی فراهم میکنند. علاوه بر این، کامپیوترهای درون خودروی لنر همچنین اتصالات شبکه لازم را با پورتهای اترنت گیگابیت و ماژولهای گسترشی برای LTE، 5G، PCIe و موارد دیگر ارائه میدهند.
اغلب کامپیوترهای درون خودروی سری لنر همچنین با استاندارد E13 [1]سازگار هستند و گواهینامههای مقاومت در برابر شوک و لرزه مشکل MIL-STD-810G [2]را به دست آوردهاند. این گواهینامهها اطمینان میدهند که کامپیوتر درون خودرو میتواند در برابر شوک و لرزه مقاوم باشد و دماهای گسترده را پشتیبانی کند.
[1] استاندارد E13 (ECE R13) یک استاندارد بینالمللی مورد تأیید توسط سازمان معاونت اقتصادی و اجتماعی سازمان ملل (UNECE) میباشد. این استاندارد به تأیید ساخت و اجرا از نظر ایمنی و بهرهوری کارکرد صندلیها و کششبندهای سیستم ایمنی در خودروها میپردازد.
[2] MIL-STD-810-G یک استاندارد نظامی است که توسط وزارت دفاع ایالات متحده برای تعیین مشخصات محیطی و تستهای ارتعاش، شوک، دما، فشار، رطوبت و سایر شرایط محیطی برای تجهیزات نظامی و تجهیزات مشابه تعیین شده است. این استاندارد برای اطمینان از اینکه تجهیزات نظامی در شرایط محیطی مختلف و در معرض شوکها و ارتعاشهای مختلف قابل عملکرد هستند، استفاده میشود. MIL-STD-810-G شامل یک مجموعه از تستها و معیارها است که به تجهیزات نظامی کمک میکند تا در مقابل محیطهای سخت و شرایط دشوار مقاومت داشته باشند.
1- سیستم محاسباتی لبه با عملکرد بالا درون خودرو.
پردازش هوش مصنوعی به صورت زمان واقعی برای خودروهای خودران چالشبرانگیز است اگر پردازش بر ابر متکی باشد. ارسال و دریافت مقادیر زیادی از داده به ابر و انتظار داشتن پاسخ سیستم رانندگی خودکار به صورت زمان واقعی تقریباً غیرممکن است.
برای حل این مشکل، تولیدکنندگان خودروهای خودران میتوانند از محاسبات لبه بهرهبرداری کنند. ایجاد محاسبات در شبکه لبه (محاسبات لبه) نزدیکترین نقطه به مکان تولید داده، کلید حل مسائل انتقال دادههای حجیم، تاخیر و چالشهای امنیتی است.
سیستم رانندگی خودکار میتواند از دستگاههای محاسباتی لبه لنر بهرهبرداری کند زمانی که به محاسبات با عملکرد بالا برای رانندگی خودران و اجرا نیاز دارد. دستگاههای با فرم فاکتور 1U کمحجمی مانند NCA-5710 توان محاسباتی لازم (محاسبات لبه) را فراهم میکنند تا بتوانند دادهها را درون خودرو پردازش کنند (بدون ارسال آن به ابر).

2- MCU مبتنی بر Ice Lake برای سیستم رانندگی خودکار
NCA-5710 برای عملکرد بهینه، افزایش امنیت، افزونههای نرمافزاری و امکان بزرگنمایی ماژولیزه بهینه شده است. این دستگاه توسط پردازندههای سروری اینتل Core نسل 10 موبایل و Xeon Scalable نسل 3 (کد نام ایسلیک-SP) بر اساس معماری میکروکد Sunny Cove تغذیه میشود. پردازنده میکروکد Xeon Ice Lake دارای هوش مصنوعی میباشد. این کنترل کننده میکروکد مناسب برای بسیاری از کاربردها است، از جمله محاسبات با عملکرد بالا، شبکهسازی و لبه هوش مصنوعی. MCU مبتنی بر Ice Lake با Intel® Deep Learning Boost به مقیاس هوش مصنوعی با عملکرد بالا را به خودرو میآورد.
ویژگیهای کلیدی دیگر NCA-5710
ذخیرهسازی قابل بزرگنمایی. NCA-5710 دارای دو خانه داخلی 2.5 اینچی برای گسترش فضای ذخیرهسازی میباشد. IPMI درونبند (SKU B و C). NCA-5710 دارای یک رابط مدیریت هوش مصنوعی پلتفرم (IPMI[1]) درونبند است.
فرم فاکتور کوچک. طراحی کم حجم NCA-5710 میتواند به آسانی در هر نقطهای درون خودرو نصب شود. ظرفیت حافظه. DDR4 با سرعتهای 2933/2666/2400/2133 مگاهرتز و حداکثر ظرفیت 384 گیگابایت. گسترش: اتصال بیسیم (WiFi، LTE و 5G)، انعطافپذیری ذخیرهسازی (2.5/3.5 اینچی HDD/SSD/NVMe)، گسترش PCIe، شتابدهنده GPU، تبدیل ویدئو (ویدئو 4K با پشتیبانی از H.265).
[1] IPMI یک پروتکل است که برای مدیریت و نظارت بر سختافزار سرورها و تجهیزات سختافزاری استفاده میشود. IPMI مخفف “Intelligent Platform Management Interface” است و به مدیران سیستم اجازه میدهد تا به صورت از راه دور و بدون نیاز به دسترسی مستقیم به تجهیزات سختافزاری، مشکلات سیستمی را تشخیص دهند و مدیریت کنند.
مزایای این راه حل
MC مبتنی بر Ice Lake مطابقت کاملی با محاسبات لبه درون خودرو دارد که برای امکان رانندگی خودروها لازم است. محاسبات لبه تغییری در روش رانندگی ایجاد میکند و ارزشهای شگفتانگیز دیگری را برای رانندگان به همراه دارد.
- کاهش داده. محاسبات لبه به خودروها کمک میکند تا دادههای خود را در محدوده فاصله کمتری پردازش کنند. این پردازش دادهها در شبکه لبه ممکن است شامل فشردهسازی، حذف تکرار و تجمیع باشد تا کاهش قابل توجهی در مقدار دادههای خام ایجاد شود.
- پهنای باند سریع و تاخیرات کمتر. از آنجایی که به مقدار قابل توجهی از دادهها نیازی به ارسال به ابر و برگشت نداریم، تاخیرات شبکه به طرز قابل توجهی کاهش مییابد و نیاز به پهنای باند بیشتر هم کاهش مییابد. کاهش نیاز به پهنای باند بیشتر پسخرج صرفهجویی مالی را ایجاد میکند، در حالی که تاخیرات کمتر زمان پاسخ برنامه را بهبود میبخشد.
- امنیت و مطابقت. محاسبات لبه دادهها را در شبکه لبه پردازش میکند، سپس این پردازش میتواند در مرکز داده جغرافیایی نزدیک، MEC، یا خودرو انجام شود. این پردازش محلی (یا منطقهای) به اطمینان و اطمینان امنیتی کمک میکند.
- هوش مصنوعی لبه. ایجاد هوش مصنوعی در لبه امکان مانیتورینگ خودرویی با تاخیر حیاتی مانند پیگیری اشیاء، تشخیص، شناخت مکان و حریم خصوصی دادهها را فراهم میآورد. هوش مصنوعی لبه همچنین امکان پذیر است اگر دادههای جمعآوری شده (در خودرو) بلافاصله پردازش شود، به طوری که تصمیمگیری و پیشبینی در زمان واقعی بدون نیاز به منابع از راه دور (ابر) امکانپذیر باشد.
برای دریافت مشاوره فنی،استعلام قیمت و سفارش NCA-5710 با کارشناسان ناوک هوشمند پویان تماس بگیرید.
محصولات ویژه

NCA-5710
تجهیزات شبکه با فرم فاکتور 1U برای مدیریت ترافیک شبکه و امنیت مجازی شبکه.
| CPU | 2nd Gen Intel® Xeon® Processor Scalable Family (Skylake-SP/Cascade Lake-SP) |
| Chipset | Intel® C621/627 |


بدون دیدگاه